



の技術的ソリューション 自動上板直交座標マニピュレータ
図 1 は、推奨される 2 軸ハンドリング ロボット ソリューションの全体的なレイアウトです。含まれる主な部分は次のとおりです。
1. 2軸ハンドリングロボット。
2. ロボットのベースとブラケット。
3. ロボット制御システムおよび電気ボックスなど
4.ロボット安全保護ネット等

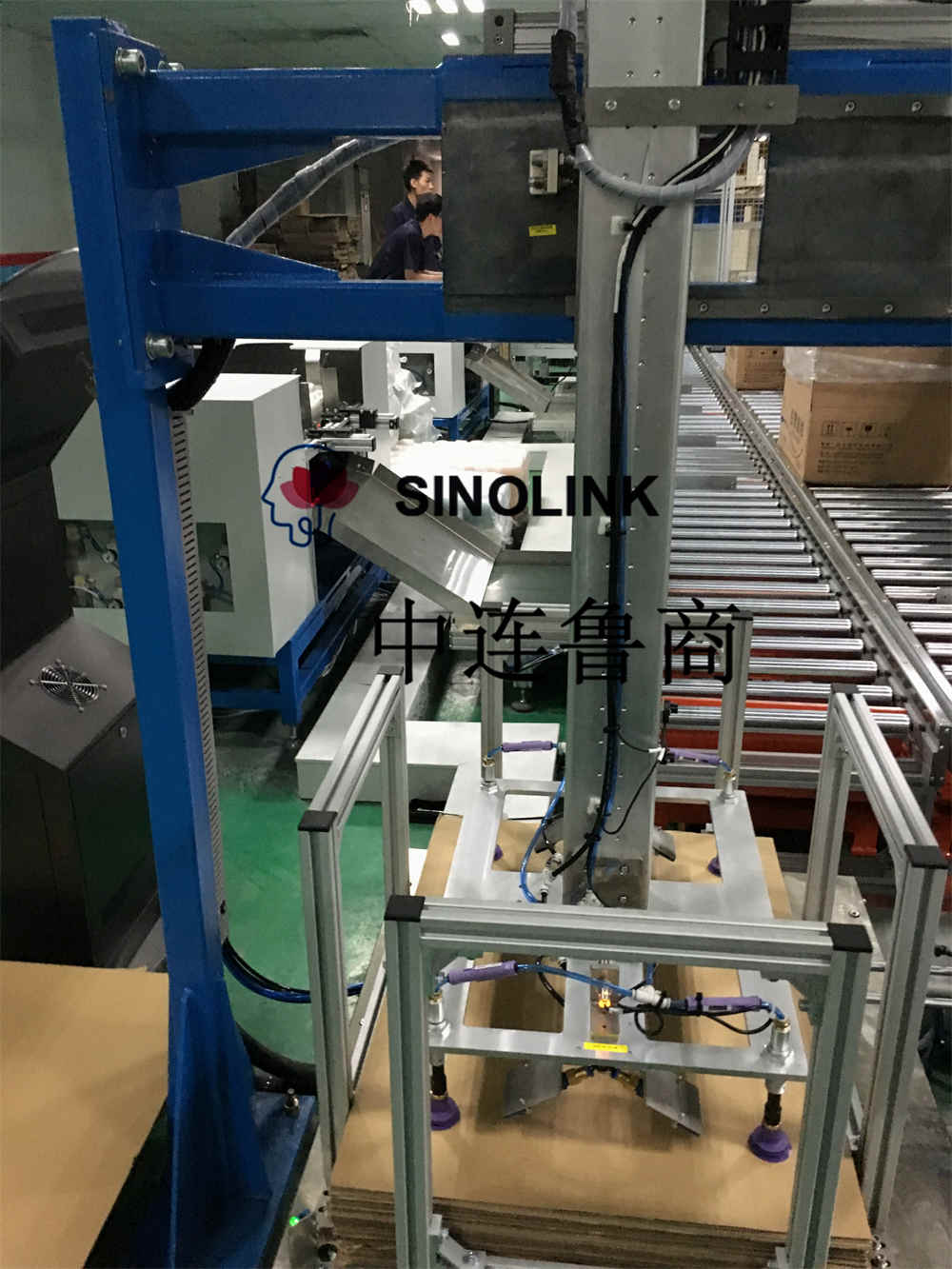
ロボットの X 軸と Z 軸の定義を図 1 に示し、グリッパー機構を設計します。この計画は暫定的な計画にすぎず、双方によるさらなる議論と実証を経て修正および改善される必要があります。最終的なデザインは、双方が満足するまで貴社でデザインします。参考までに過去の事例を図2に示します。
ロボットの主要部品の紹介
1. ロボットの X 軸:
X 軸として直線運動ユニットを使用し、負荷伝達には高精度の歯付きベルトドライブを使用します。単独で使用することも、2 台のガントリー伝送直動ユニットと並行して使用することもできます。直動ユニットは平面上に固定され、スライダモーションモータは動かないため、平面上の長距離移動に使用できます。
2台の共用ロボットによる前後進ストローク:6000mm
ロボット2台共用 昇降ストローク:500mm
ロボット単体の前後進ストローク:3000mm
ロボット2台共用 昇降ストローク:500mm
前後移動:モーター駆動、駆動モーター出力1.5kw
上下移動:モーター駆動、駆動モーター出力1.5kw
2. ロボットの Z 軸スキーム:
Z軸には、回転軸を備えた直線運動ユニット、2つのリニアガイドガイド、高精度同期ベルトドライブが採用されており、単一の標準スライドを備えたZ軸の特定のパラメータはX軸のパラメータと同じです。実際の図を図 4 に示します。サーボ モータは保持ブレーキ付きの AC サーボ モータです。

3. ロボットベース
溶接部品方式を採用し、アンカーを介して地面と接続します。基本モデル図と物理図を図 5 と図 6 に示します。


4. 制御システム
ロボットの制御システムにはシーメンス PLC が採用されており、特定のモデル、サポートするタッチ スクリーン HMI および I/O ポートの数は特定のニーズに応じて決定されます。
1. PLC 制御システムによって実行される作業
1) ハンドリングおよび供給プロセスの制御機能を実現
2) 手動・自動ロード・アンロード制御機能付き
3) 生産プロセスの再プログラミングと最適化(パスワード付き)
4) セーフゾーン機能を設定し、すべてのアクションにおいて各アクションの代わりにセンサー信号を検出し、信号レベルで紡績機とのハンドシェイクを調整する必要があります。
5) データ管理を実現するために、イーサネット通信機能またはプロフィバス機能を備えた PLC を選択できます。
6) パラメータは、USB、CF カード、その他のメディアを介してデータとプログラムを転送できます
7) 多軸の同時移動が可能
8) 高い安定性、高い走行速度、高い加減速度。

詳細については、いつでもお問い合わせください。
戦争
WhatsApp:+86 15634865861







